- 产品描述
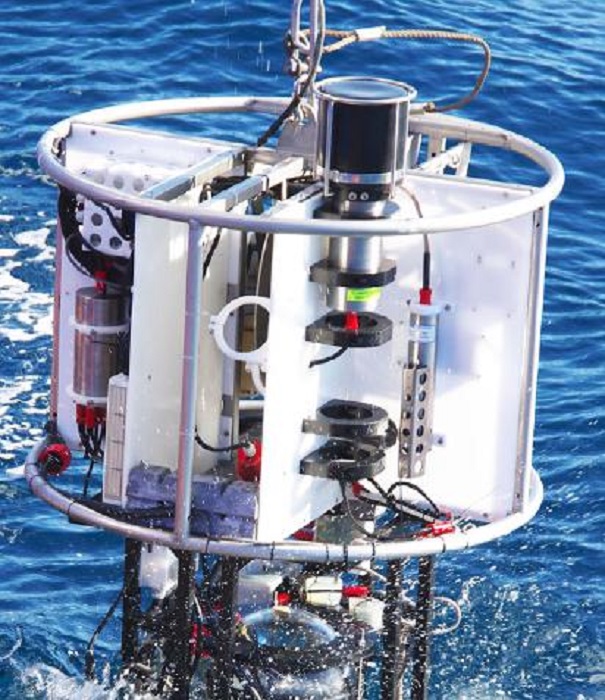
S2CR USBL水下通信定位系统 S2CR USBL集成定位和通信功能,具有S2C技术通信链路,提供USBL超短基线定位和全双工数字通信,为需要空间、节能和成本节约提供解决方案。 定位和通信功能同时进行,不需要在定位和通信模式之间进行切换。这两个功能在一个集成的定位和通信系统中相互补充,为海底应用开辟了新的可能性。 一个USBL收发器被安装在船上,并使用声学信号来确定到跟踪目标的距离和方位。USBL收发器测量从传输其声询问信号到检测到应答器的声应答的时间,并将其转换到应答器的距离。收发器包含多个由短距离(超短基准天线)分开的传感器,使用相位差分方法计算与应答器的角度。 应答器连接到水下跟踪目标上,例如水下AUV、ROV、拖鱼等。应答器用自身的声学脉冲来响应来自USBL收发器的声学询问信号。可选的第三方传感器(AHRS传感器和/或GPS接收器)提供有关船舶的方向和实际坐标的信息。客户的导航计算机与USBL收发器和外部仪表进行接口,并连接到本地计算机网络。 导航计算机上安装了EvoLogics定位软件SiNAPS。SiNAPS定位软件控制定位系统,并提供显示功能,以实时显示任务。 S2CR USBL性能优势: 兼容性-使用S2CR和M系列调制解调器作为发射器或应答器; 基于仿生研究的*利S2C(扫描扩散载波)技术扩展频谱技术; 同时进行USBL定位和数据传输,同时跟踪多个目标; 自适应算法在恶劣水下条件下提升性能,内置前向纠错和数据压缩; 具有几种数据传输算法的通信协议:以尽可能的比特率发送和接收大量数据,发送和接收短的即时消息,而不中断设备之间的主数据流; 寻址和网络:建立具有广播能力的中继链和水下网络; 低功耗和其他节能选项。 S2CR USBL应用: 海上设备的定位 跟踪安装过程中海上设备的位置,以确保在预定坐标下的准确放置。 ROV、AUV的导航 同时跟踪多个rov或auv的位置,并使用即时命令控制其任务。 制图 当与GPS或差分GPS一起使用时,可以使用地理参考坐标定位水下特征。 提高测量精度 跟踪传感器和探测器的位置,以提高测量的精度。 潜水员跟踪 监视几名潜水员的位置,并在任务期间与他们交换信息。 模块和可选配置: AHRS(航姿参考系统); GPS集成; 可充电电池; 声唤醒模块; 集成数据记录器; 声学释放器; 可选浅水或深水,中程或远程范围应用; 可选OEM版本; 兼容S2CR系列Modem和LBL定位系统。 SiNAPS定位软件:S2C智能导航和定位软件 EvoLogics SiNAPS是一个客户端-服务器框架结构应用。SiNAPS服务器是一个软件组件,安装在与USBL收发器和其他外部仪器接口的导航计算机上。SiNAPS服务器接收、处理和存储来自USBL收发器和外部仪器的数据。它执行所有必要的计算,以在屏幕上显示这些信息。 SiNAPS客户端是定位系统基于web的用户界面。它显示了有关定位目标的位置实时信息,同时提供对数据管理工具和系统配置设置的访问。用户界面可以在本地计算机网络中任何设备上的web浏览器中打开。支持同时在多个设备上打开SiNAPS客户端。 技术参数: 常规 工作深度:200m(Derlin),1000m(铝合金),2000m(不锈钢),6000m(钛合金); 操作范围:3500m; 频率:18-34kHz; 换能器波束:水平(可选球形); USBL 倾斜范围精度:0.01m; 方向分辨率:0.1°; SNR:10dB; 连接 声学连接:达13.9kb/s; 误码率:小于10-10; 内部数据缓存:1MB,可配置; 主机接口:Ethernet, RS-232 (RS-485/422*); 电源 功耗:待机模式(2.5mW),listen模式(5-285mW),接收模式(<1.6W),发射模式(1000m范围2.8W,2000m 8W,3500m 35W,可达80W); 电源:外部24VDC或内部电池组; 物理 尺寸:外壳直径110 mm x218 mm,总长355mm; 重量(空气/水中):Derlin(5775 / 730g),铝合金(5500 /1800g),不锈钢(13130/6130g),钛合金(9830 /4830g)。
欢迎来到杭州海蛟科技有限公司网站,我公司位于与苏州并称“苏杭”,素有“上有天堂下有苏杭”美誉的杭州。 具体地址是浙江杭州江干区公司街道地址,联系人是桂。
主要经营杭州海蛟科技有限公司是致力于海洋水环境监测、鱼类和水生生物研究、陆地应用科研设备的高科技公司,为客户提供高精度的科研仪器设备和系统解决方案。公司产品主要用于海洋综合科学考察、鱼类和水生生物研究及保护、水下工程及探测、海洋声学、海洋导航定位、海洋生态环境监测等。。
我们公司主要供应海洋水环境监测,陆地应用科研设备,鱼类和水生生物研究等产品,我们的产品货真价实,性能可靠,欢迎电话咨询!
本页链接:http://www.cg160.cn/vgy-119258625.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
关于杭州海蛟科技有限公司
商铺首页 |
更多产品 |
联系方式
- 我要给“S2CR USBL水下通信定位系统”留言
- 更多产品









相关分类






