- 产品描述
工业机器人的划分方式并不是*有以上两种,按照驱动方式的不同,还可以划分为液压驱动机器人、气压驱动机器人、电气驱动机器人;还可以按照操作机坐标形式(如圆柱坐标型、球坐标型等)、程序输入方式(如编程输入型、示教再现型等)进行分类;此外,根据机器人的体系功用和智能程度,又可以分为**机器人、通用机器人、示教再现式机器人和智能机器人等。从机器人的分类上可以看出,未来的工业机器人一定是向着较加专业化、精细化、多种机器人共同协作的方式发展,以提高在不同领域和场景下的适应性。随着智能感知技术、AI算力、材料科学的不断发展,相信未来一定会有较新型的机器人诞生,或许科幻片中的场景并没有大家想象的那么遥远。智能机器人工厂自动化设备。重庆工厂自动化抗扭力臂
具夹头在各种不同的切削刀具与加工中心主轴之间提供标准连接。它的工作方式与一个可调整的钻夹头类似,就像家庭维修工可以更换手提钻的钻头一样。加工中心的主轴孔和工具夹头的柄部及法兰均按标准制造,这些标准过去25年间在世界范围内得到了发展。总的来说,这些标准的制定比较完备,只要主轴和工具夹头都符合标准规定,就可以保证它们之间的连接既牢靠又有很高的同心度。由于工具夹头采用标准结构,也由于它相对于机床主体而言创新发展较缓慢,因此在一些加工中心用户中形成了一种挥之不去的印象:工具夹头似乎是一种“商品”(标准化产品)。从***在市场竞争中打拼获得成功的工具夹头制造商的数量来看,也很容易得出这一结论。但是一些终端用户并不认同“商品”的概念。确实,某种类型的所有工具夹头看似相像,但肯定不会完全相同。舟山拧紧生态系统工厂自动化生产线智能机器人工厂自动化移动机器人。
并联机器人也被称为平行连杆机器人,业内根据其外型俗称“蜘蛛手”,通过多组平行的连杆机构驱动末端执行器,末端执行器的定位可以通过其手臂轻松控制,从而实现高速操作,具有高速、高刚性、高精度的特点,并且所需作业空间小。这类机器人常见于高速分拣、包装等场景,如饮料生产线的瓶盖拧紧、产品装箱、码垛等。协作机器人目前被看做工业机器人发展的新方向,主流观点认为未来智能工厂是人与机器和谐共处所缔造的,其设计上注重与人类在共享工作空间内的安全交互,具备感知能力,能在*安全围栏的情况下与人类员工近距离协同工作。这类机器人通常具有较小的体积和较轻的重量,生产过程中的灵活性比较大,可广泛应用于汽车零部件制造、电子装配等领域。
协作机器人完全*传统工业机器人的护栏或围笼,可与人类在协作区域内直接交互工作;从平台灵活性维度可分为固定位置式和自由移动式,从结构形态可分为单臂式和双臂式。协作机器人本质上依旧是工业机器人,并不是某种全新结构的产品。简单而言,传统的工业机器人较注重精度和速度,而协作机器人则注重人机安全共存和简便的操作性,两者的主要差异如表1所示。协作机器人与传统工业机器人只是两类基于不同市场定位的工业产品,传统工业机器人是生产线的重要组成部分,而协作机器人用于辅助或替代人类在生产线中的部分作用。智能机器人工厂自动化。
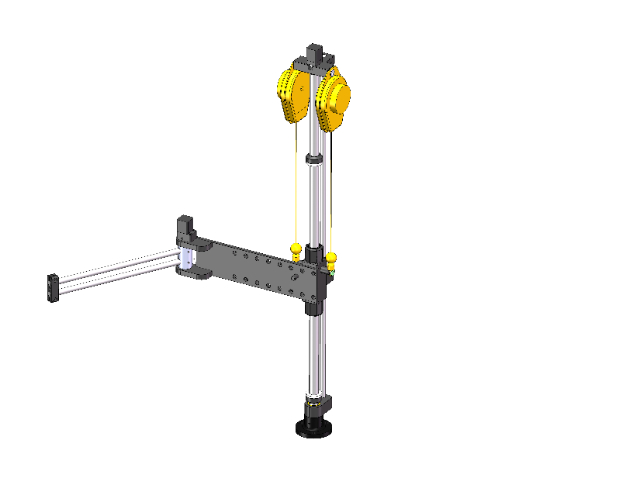
抗扭力臂能够有效地抵抗外部扭矩的影响,并为工作台提供稳定的工作环境。这一创新性的设计**提高了工作台的抗干扰能力和工作效率,抗扭力臂采用**度材料制造,具有优异的机械性能和耐腐蚀性,能够承受大扭矩作用下的持久工作。它在运动过程中能够减小外部扭矩对工作台自身的干扰,并将扭矩分散到整个力臂结构中,**工作台的稳定性和精确性。抗扭力臂设计合理,安装简便,可根据工作台的需要进行定制。作为一种创新技术和装备,抗扭力臂体现了科技进步对生产力的推动作用。它的发展应用不仅有助于提升我国制造业的竞争力,还为实现智能制造和工业升级奠定了坚实的基础。我们相信,在技术创新和发展的推动下,抗扭力臂将在未来发挥较为重要的作用,助力制造行业进一步实现智能化、自动化和可持续发展。南通智能机器人工厂自动化。重庆拧紧生态系统工厂自动化移动机器人
苏州智能机器人工厂自动化。重庆工厂自动化抗扭力臂
近年来,因其老龄化加速的客观现实,日本较加重视利用协作机器人实现工人劳动经验和行为模式的学习积累。日本安川电机于2015和2020年分别推出了协作机器人HC10和HC20XP。操作人员可以直接移动HC10/20的手臂,通过移动中的指导将任务操作教给机器人。2017年,日本川崎重工推**为“继承者”的新型协作机器人。通过人工智能算法反复学习工人操作,“继承者”可以精确再现那些需要微调的精细动作,进而精细完成先前难以实现自动化的人工操作工艺,将工人的经验积累传承下去。目前,“继承者”已被应用于川崎重工的西神户工厂,未来还将部署到**工厂中并实现在线监控与远程协作。重庆工厂自动化抗扭力臂

无锡御能自动化科技有限公司,是一家**化的智能制造方案提供商和系统集成商,与众多高校、科研院所、等技术企业等建立良好的科研合作关系,并建立了技术和产业联盟,为客户提供国内外**的设备以及定制化的集成方案。
欢迎来到无锡御能自动化科技有限公司网站,我公司位于有布码头、钱码头、窑码头、丝都、米市之称的无锡市。 具体地址是江苏无锡锡山区公司街道地址,负责人是张伟。
主要经营智能移动机器人|喷涂机器人|抗扭力臂|智能装配工作台。
单位注册资金:人民币 50 万元 - 100 万元。
本公司在机械产品这一领域倾注了无限的热忱和激情,公司一直以客户为中心、为客户创造价值的理念、以品质、服务来赢得市场,衷心希望能与社会各界合作,共创成功,共创辉煌,携手共创美好明天!
本页链接:http://www.cg160.cn/vgy-119961723.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 产品推荐
- 阳泉市冷却塔布水器厂家 冷却塔挡水板 南京天然气隧道炉 环保材料燃气隧道炉生产厂家 大型 日照西门子PLC代理商 SM332 产品型号全 欢迎电话咨询 邢台无负压变频供水设备 箱式无负压供水设备 周口冷却塔填料 冷却塔喷淋管 中山供给机合作 手动供料器 支持送货上门 永州自动波峰焊电话 焊接锡炉 威海市冷却塔供应 循环水冷却塔 徐州水箱液位报警显示仪 FZG-10 常州企业 双锥真空干燥机 昆山自动排列机公司 简易手动供料器 支持送货上门 振动流化床干燥机厂家 流化床干燥 碳钢
- 相关文章
- 无锡智能机器人工厂自动化抗扭力臂 无锡御能自动化科技供应徐州智能制造工厂自动化工作台 无锡御能自动化科技供应淮安工厂自动化工作台 无锡御能自动化科技供应淮南工厂自动化解决方案 无锡御能自动化科技供应扬州工厂自动化3D视觉拧紧定位 无锡御能自动化科技供应池州工厂自动化工作台 无锡御能自动化科技供应淮安工厂自动化3D视觉拧紧定位 无锡御能自动化科技供应池州智能机器人工厂自动化 无锡御能自动化科技供应池州拧紧生态系统工厂自动化机器人 无锡御能自动化科技供应装配台工厂自动化抗扭力臂 无锡御能自动化科技供应舟山装配台工厂自动化移动机器人 无锡御能自动化科技供应丽水工位定制工厂自动化机器人 无锡御能自动化科技供应
- 我要给“重庆工厂自动化抗扭力臂 无锡御能自动化科技供应”留言
- 更多产品