
- 产品描述
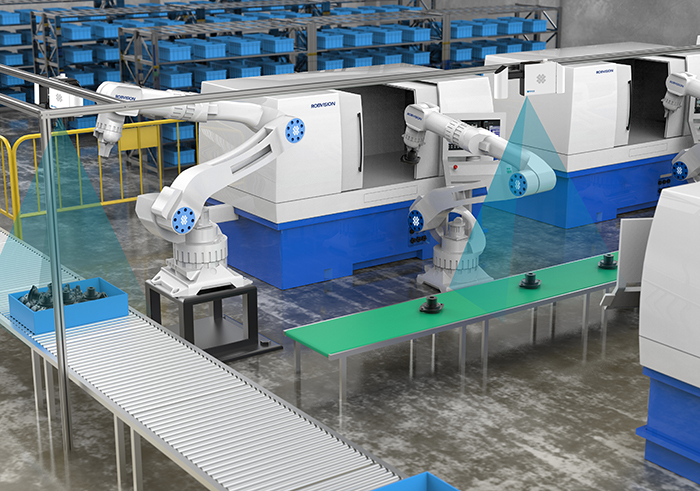
针对散乱无序堆放的工件设计,可协助机器人实现3D智能抓取。通过对工件3D数据扫描以实现三维准确定位,引导机械手准确抓取定位工件,实现了工业机器人自动化生产线的柔性工装。
技术原理:
通过高速、的3D结构光成像系统,对物体表面轮廓进行扫描,形成点云数据;并对点云数据进行智能分析处理,加以AI算法、机器人路径自动规划、自动防碰撞等智能化技术;计算出当前工件实时空间坐标,并引导机器人完成自动抓取任务。协助机器人集成商快速完成3D定位方案。
解决方案:
通过机器人3D定位系统,引导机器人抓取曲轴并根据三维特征**放置
通过3D视觉方案实现三维扫描定位
快速建立、更换数据模型(建模)满足小批量多品种的生产需求
智能分析工件抓取**级,引导工业机器人快速精准抓取工件,有效解决上下层工件相互干扰的问题
客户收益:
系统结构简单、经济实用,有效降低生产成本和维护成本。
产线柔性高,不仅可以满足现有不同型号产品的生产,同时支持用户快速添加新的型号。
产品质量提升的同时将工人们从繁复的劳动中解放出来。
项目背景:某大型快递公司分拣线,每个工位使用人工从混合堆叠的快递包裹中拣选出来,并将有面单的一面朝上放置在传送带上。
技术分析:实现无人抓取、分类、面单识别
Ø混合包裹有箱子、软包、信封件
Ø需要对面单有无进行检测
Ø包裹上有黑色、反光胶带
解决方案:深度学习检测分类,3D识别定位引导机器人抓取
Ø通过深度学习对包裹检测识别分类、检测面单
Ø通过3D点云定位抓取中心
Ø通过运动旋转控制寻找侧面面单
常用的3D视觉技术包括:
n双目立体视觉和结构光
nToF (Time-of-Flight)
n激光三角测量法
每项技术根据不同的原理来记录三维信息,它们均有不同的优点和缺点。
针对散乱无序堆放的工件设计,可协助机器人实现3D智能抓取。通过对工件3D数据扫描以实现三维准确定位,引导机械手准确抓取定位工件,实现了工业机器人自动化生产线的柔性工装。
该系列广泛用于各类工作无序状态的上下料、分拣、拆码垛、装配等场景,具有精度高、速度快,布置快速,维护方便的特点。全系列产品智能化程度高、通用性强,*二次开发,帮助客户实现柔性化产线。能够大幅度改善锻造邮件、锻造部件、冲压钣金件、树脂成型邮件、软硬包装箱等各种异形工件的分拣速度,降低人力成本,提升客户的竞争力。
技术原理:
通过高速、的3D结构光成像系统,对物体表面轮廓进行扫描,形成点云数据;并对点云数据进行智能分析处理,加以AI算法、机器人路径自动规划、自动防碰撞等智能化技术;计算出当前工件实时空间坐标,并引导机器人完成自动抓取任务。
杭州蓝芯科技自研的悟空系列3D视觉传感器具有高分辨率、高精度的特点,可以为客户提供可靠的彩、深度图和点云。空间分辨率达到230万像素,深度测量精度可达0.2mm。硬件上采用GPU加速,3D成像速度快可达0.4S。


杭州蓝芯科技有限公司**研发团队由国内外的人工 智能*组成,在计算机视觉、人工智能、机器人等方面 拥有丰富的研究和实践经验。 公司以计算机视觉为**技术,利用 人工智能技术赋予机器人深度视觉感 知能力,让机器人“能行走,会做 事,较会思考”。 公司专注于电商仓储和智慧工厂物流 两大应用领域,提供智能搬运机器 人、3D视觉传感器、用于提高作业效 率的智能调度软件等**的产品 和解决方案。 公司现已申请专利19项,其中发明 **9项,并已获得软件着作权5项。? 公司的使命及愿景 让机器人 “看懂”世界, 服务世界! 愿景: 成为**的机器人技术和服务提供商!
欢迎来到杭州蓝芯科技有限公司网站,我公司位于与苏州并称“苏杭”,素有“上有天堂下有苏杭”美誉的杭州。 具体地址是浙江杭州余杭区公司街道地址,负责人是方伟君。
主要经营3D视觉传感器。
我门公司主要的服务有:仪器仪表 传感器 视觉/图像传感器 ,为您提供诚信、安全、高效的优质物流服务!较大程度降低您的物流成本。欢迎您致电咨询!
本页链接:http://www.cg160.cn/vgy-95515843.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
关于杭州蓝芯科技有限公司
商铺首页 |
更多产品 |
联系方式
杭州蓝芯科技有限公司**研发团队由国内外的人工 智能*组成,在计算机视觉、人工智能、机器人等方面 拥有丰富的研究和实践经验。 公司以计算机视觉为**技术,利用 人工智能技术赋予机器人深度视觉感 知能力,让机器人“能行走,会做 事,较会思考”。 公司专注于电商仓储和智慧工厂物流 两大应用领域,提供智能搬运机器 人..
- 我要给“机器人3D视觉系统解决方案 深度视觉感知系统”留言
- 更多产品












相关分类






