
- 产品描述
冲压机器人日常保养时,需注意机器人工作空间环境的洁净度,粉尘较多会进入冲压机器人中,会增加导轨的磨损程度,影响定位精度和使用寿命,需要定期及时地对空间环境进行整体清洁!
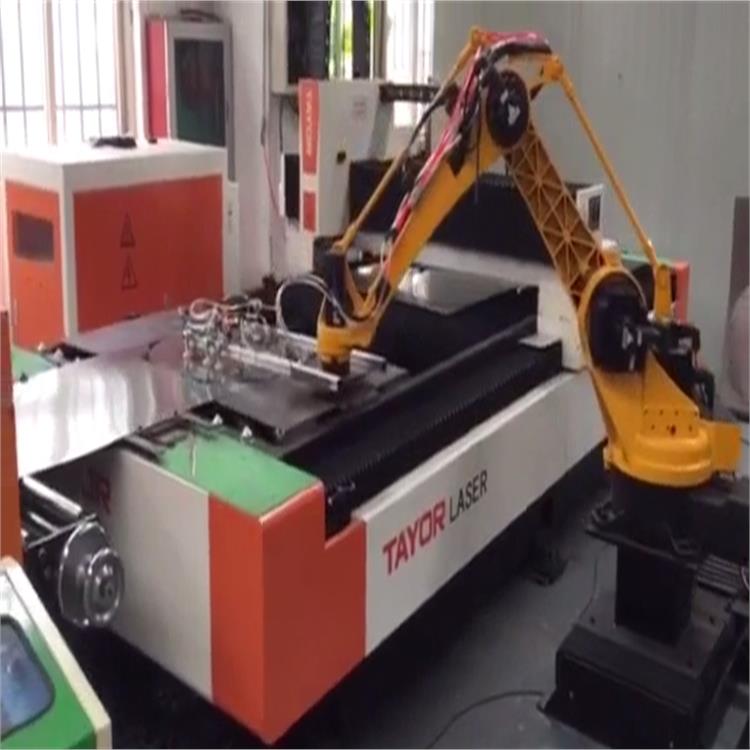
四轴冲压机器人机械手每个关节的运动均由一台伺服电机和一台高精度谐波减速机共同实现,每个直线轴均由伺服电机和精密丝杠共同实现;同时配以的电器控制柜和示教盒,其性能优越、价格低廉、操作简便。能够随意连接油压机、齿轮冲床、气动冲床、攻牙机、铆钉机等,无论冲床吨位大小、机台高低、都可连接,实现设备自由组合、多角度实现各种复杂冲压动作、翻转、打废料、侧挂或斜放、堆料等,并适应连续模、单机多模的工艺要求等。预存100组产品工艺信息、方便转产。识别双料和冲床两次或多次冲压,保护工业机器人、冲床和模具的安全并能实现远程通讯。
冲压机器人的动态特性是怎样的呢
冲压机器人结构动态参数主要包括质量、惯性矩、刚度、阻尼系数、固有频率和振动模态。
设计时应该尽量减小质量和惯量。对于冲压机器人的刚度,若刚度差,机械手的位置精度和系统固有频率将下降,从而导致系统动态不稳定;但对于某些作业,适当地增加柔顺性是有利的,理想的情况是希望机械手臂杆的刚度可调。增加系统的阻尼对于缩短振荡的衰减时间、提高系统的动态稳定性是有利的。提高系统的固有频率,避开工作频率范围,也有利于提高系统的稳定性。
四轴机器人产品特点:
1、冲压、液压自动化生产机器人;
2、四轴机构,灵活运动,适合多种工况;
3、伺服驱动,性能稳定,提高运行精度;
4、配套客户现**床,实现自动冲压;
5、操作简便,界面友好,方便员工学习。
冲压工业机器人也俗称:冲压机械手。用于冲压件的自动化搬运。目前,应用于冲压自动化生产线的冲压机械手主要有类:关节式冲压机械手、连杆式冲压机械手、摆臂冲压机械手。这三类冲压机械手因其各自的特点而应用于不同场合的冲压自动化生产。相较来说,各有其优点和不足。
关节式冲压机械手:自由度高、动作灵活、通用性强,但价格昂贵、使用操作技术要求较高。
连杆式冲压机械手:稳定、控制简单、成本较低,但灵活性和适用性较差,不易调整。
摆臂冲压机械手:融合了关节式机械手“高自由度”,以及连杆式机械手“稳定”的双重特性,价格适中、控制比较灵活、使用操作简单。不足的地方是,摆臂式的结构具有较大的转动惯量,一定程度地限制了机械手的运动速度和重复定位精度。
我们公司依托在机器人自动化领域的经验和优势,重点突破生产自动化、工业机器人的系统集成、研发和生产,为用户提供完整的系统解决方案。广泛服务于汽车、摩托车、自行车、金属家具、健身器材等行业。


东莞市科智达机器人有限工业是一家从事工业机器人研发,生产,销售于一体的机器人厂家,目前包含了喷涂机器人,冲压机械手,焊接机器人,搬运机器人,码垛机器人等多系列机器人。目前公司年出货量近千台,深受市场喜欢。
欢迎来到东莞市科智达机器人有限公司网站,我公司位于素有“龙舟之乡、中国民间艺术之乡、举重之乡、粤剧之乡”之美誉,号为“世界工厂”的东莞市。 具体地址是广东东莞虎门公司街道地址,负责人是卢经理。
主要经营喷涂机器人。
本公司在机械产品这一领域倾注了无限的热忱和激情,公司一直以客户为中心、为客户创造**的理念、以品质、服务来赢得市场,衷心希望能与社会各界合作,共创成功,共创辉煌,携手共创美好明天!
本页链接:http://www.cg160.cn/vgy-92075329.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 产品推荐
- 内蒙古精工牌斜轴泵批发价格 诚信经营 启东高压油泵供应 重庆升降机 欢迎咨询 济南威龙液压机械供应 内蒙古盘式干燥机设备方案 服务为先 常州市三汇干燥设备供应 中山重型46型双主轴数控车床供应商 广东米克智能科技供应 上海多出胶口施胶机品牌推荐 武藏点胶机 上海亚哲电子科技供应 辽宁特材球座源头厂家 推荐咨询 温州泓睿阀门供应 内蒙古液压杆激光熔覆设备 增材 立匠 广西旋转闪蒸干燥设备安装 常州市贝奇干燥设备供应 数控编程五轴加工哪家好 欢迎咨询 深圳裕元精密五金机械供应 汕头20型车铣复合机厂家供应 广东米克智能科技供应 重庆新能源电机平衡机哪里买 贴心服务 苏州赛德克测控技术供应 江苏弱磁性矿物除铁器供应商 佛山乔岳智能供应
关于东莞市科智达机器人有限公司
商铺首页 |
更多产品 |
联系方式
东莞市科智达机器人有限工业是一家从事工业机器人研发,生产,销售于一体的机器人厂家,目前包含了喷涂机器人,冲压机械手,焊接机器人,搬运机器人,码垛机器人等多系列机器人。目前公司年出货量近千台,深受市场喜欢。
- 我要给“冲床机械手 广东单工序冲压机器人生产厂家”留言
- 更多产品

















