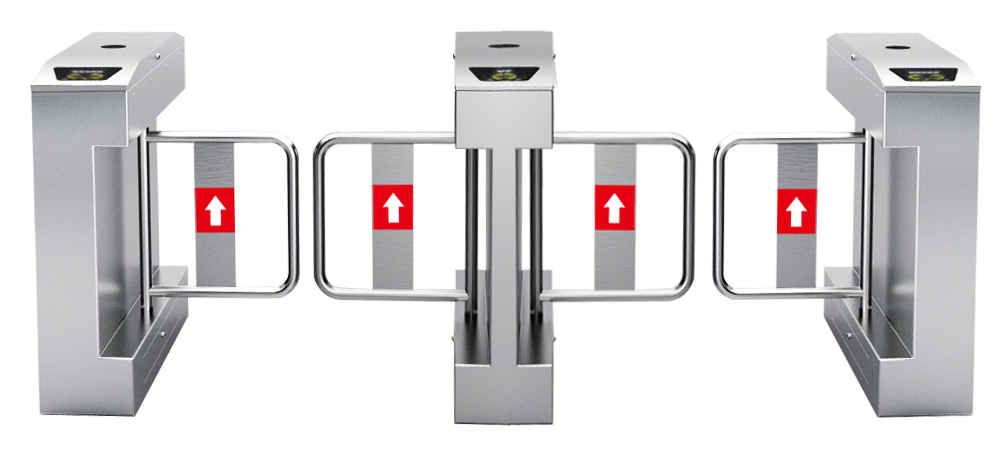
- 产品描述
注意事项:
1.烧录程序,用跳线帽短接摆闸控制板J2,连接上串口通讯线,用专用ISP烧录软件即可将程序写入主芯片,如果程序在烧录过程意外中断而多次烧录失败,尝试单独用5V电源烧录。
2.烧录完程序后,拔掉跳线帽,按下复位键,控制板运行程序后,摆闸必须通过串口软件设置初始速度值和角度值。
3..控制板上电时,不可直接插拔电源板24V直流电上电,正确的上步骤是:在电源板无输出电压的时候,即220V交流电关闭的时候,插好摆闸控制上的所有连接线,(传感器连接线,电磁铁,
电机连接线等),后直接通过220V交流闸上电,摆闸控制板就上电了。关闭闸机的时候也不要直接拔掉电源板24V插头。
4.设置好摆闸的初始角度和速度值后,如果是双摆闸应该在调试好单边的摆闸后,两台摆闸再进行联机工作模式调试,如果两台闸机的速度有明显差异,可以在利用调试软件适当调整摆闸的速度等
参数,尽量达到同步运行的效果。
5.摆闸的角度和速度值等设置好以后,测试摆闸电机转向有无错误:A向开门,摆闸主机开门应是逆时针方向旋转,说明电机转向正确,否则请将电机插座端子方向对调。
闸机的固定
1)根据具体的系统组成、使用现场以及所选用的机型,确定各闸机的安装位置。
2)按安装示意图要求、确定安装孔位,在安装位置处预埋4个M12的地脚螺钉或4个M12的膨胀螺钉。
3)固定闸机时,请先将闸机摆放整齐,检测电眼是否对准(通电后,未挡住电眼的情况下,不报警表示正常)。
工作流程
当闸机的控制器接受到一个开闸信号后,控制器逻辑板将有关执行命令发送至电机驱动板驱动电机转动,电机作为机械传动系统的动力源,带动减速器驱动闸板左右转动,实现开闸关闸动作,左右限位开关感应器运动位置,并将感应信号发至电机驱动板,控制电机运转角度。
上海金赀智能科技有限公司是一家致力于智慧交通停车诱导、智慧景区、出入口通道控制、“云”一卡通平台研发、生产、销售及服务为一体的解决方案运营商。 公司拥有行业复合型技术研发团队,具有的设计水平和前瞻的产品理念,对电子、智能及互联网、物联网技术有深刻理解。公司一直秉承“以科技创新、为社会创造**”的理念,坚持“诚信、责任、共赢”的目标,为客户提供“专注定制、稳定安全、服务及时”的产品服务。
欢迎来到上海金赀智能科技有限公司网站,我公司位于历史文化悠久,近代城市文化底蕴深厚,历史古迹众多,有“东方巴黎”美称的上海市。 具体地址是上海奉贤化学工业区奉贤分区公司街道地址,负责人是叶生。
主要经营车牌识别系统。
本公司供应安防 门禁识别设备 一卡通系统 等产品,技术,服务都是一流的,有需要的客户,可以来电咨询!
本页链接:http://www.cg160.cn/vgy-51426516.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
关于上海金赀智能科技有限公司
商铺首页 |
更多产品 |
联系方式
上海金赀智能科技有限公司是一家致力于智慧交通停车诱导、智慧景区、出入口通道控制、“云”一卡通平台研发、生产、销售及服务为一体的解决方案运营商。 公司拥有行业复合型技术研发团队,具有的设计水平和前瞻的产品理念,对电子、智能及互联网、物联网技术有深刻理解。公司一直秉承“以科技创新、为社会创造**”的理念,..
- 我要给“上海智能摆闸系统品牌 亚克力摆闸 品种繁多”留言
- 更多产品