
- 2024-12-29 06:20 1
- 产品价格:2980.00起
- 发货地址:安徽省亳州市蒙城县包装说明:不限
- 产品数量:不限产品规格:不限
- 信息编号:122449986公司编号:4287569
-
张先生 经理13335672717 (联系我请说明是在阿德采购网看到的信息)
- 进入店铺 在线咨询 QQ咨询
- 信息举报
南昌厂家智能搬运小车一件代工
- 相关产品:
南昌厂家智能搬运小车一件代工
所属行业:机械
- 产品描述
经济工作会议提出,要支持企业技术改造和设备较新。工业机器人是企业技改的。目前中国已经成为应用工业机器人程度高的,工业机器人数量占总数的56%,追赶日本、美国和韩国。但中国**工业机器人拥有量仅为23台,不及**平均水平的一半。与发达应用水平的巨大差距,意味着我国工业机器人市场发展潜力巨大。机器人技术及应用在未来**竞争中具有重要战略**,世界主要都政策,鼓励发展机器人产业。美国发布了机器人发展路线报告,将机器人与互联网放在同等重要的地位;欧盟启动了大民用机器人研发计划。我国也正制定机器人产业“十三五”发展规划。《中国制造2025》将机器人与数控机床,列为需要大力推动实现突破发展的重点领域。
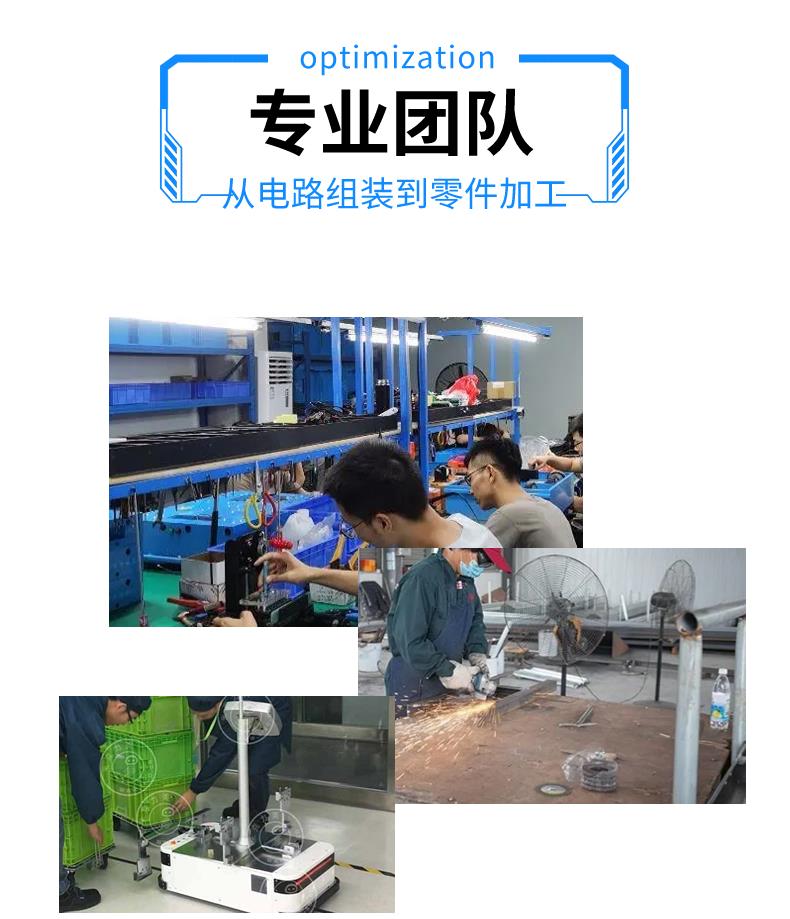
蓝芯科技自研的滚筒搬运机器人(视觉导航机器人)视觉定位导航技术充分利用室内应用环境中丰富的特息,
基于环境自然特征建图和定位,*轨道和,可自主定位和规划路径,自主行驶。
可以根据用户需求设定上下料工位,*额外人力投入,整个运输过程全程自动化。
虽然现在用于主动化流水线的视觉导航系统,可以做到0.1mm的精度,
伺服系统,是用来地跟随或复现某个过程的反馈控制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的变化的自动控制系统。它的主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制灵活方便。
伺服驱动器属于伺服系统的一部分,用来控制伺服电机,其作用类似于变频器作用于普通交流马达,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服马达进行控制,实现高精度的传动系统定位,目前是传动技术的产品。
选择一款合适的伺服驱动器需要考虑到各个方面,这主要根据系统的要求来选择,在选型之前,先分析以下系统需求,比如尺寸、供电、功率、控制方式等,为选型定下方向。下面我们来看一下伺服驱动器的各方面参数。
1.持续电流、峰值电流;
2.供电电压、控制部分供电电压;
3.支持的电机类型、反馈类型;
4.控制模式、接受命令的形式;
5.通讯协议
6.数字IO
根据这些信息我们大致能选出与电机匹配的伺服驱动器。除此之外,还要注意工作环境,温湿度情况,安装是尺寸是否合适等。
选择驱动器是不仅考虑驱动器是否与电机匹配,还要考虑控制方式等。伺服驱动器有三种控制方式:位置、速度、力矩模式。力矩模式和速度可以通过外界的模拟量输入或者通讯命令设定转矩大小,位置模式则是通过脉冲的频率和个数来确定运动的速度和运动长度。力矩模式下电机输出一个固定的力矩,对位置、速度无法控制。位置模式对速度和位置有很严格的控制,一般用于定位装置。可根据系统的需求,和上位控制类型,选择合适的控制方式。
现在伺服驱动器的越来越智能化,不仅支持类型的伺服电机,还兼容多种类型的反馈,可接收模拟量、PWM、脉冲+方向和软件命令,通信支持CANopen、Ethercat等。提供三环控制和换向功能,在智能一键调谐等。使用十分方便,有较高控制精度,使系统的性能有大幅提升,为开发人员的节省大量的时间。

安徽金云网络信息技术服务有限公司成立于2014年4月,我们专注为全国中小企业提供企业网站制作、400电话、小程序制作、企业营销推广等互联网服务。在为中小企业提供基础互联网的同时,我们在这十年的发展过程中,不断在技术和行业领域应用中进行创新和突破,截止2023年5月,我们已在人工智能领域、农业物联网、工业物联网等领域拥有成熟的产品和自主知识产权,已累积合作客户约3600多家,并与全国多家国企、上市公司等企业达成长期合作协议。 我们始于互联网,所以深知“坚持和创新才能转化为生产力”是互联网的**竞争力,凭借对软件和互联网行业的深刻理解,我们在坚持行业基础服务的同时,不断探索客户需求和凝聚大量人才去迎合市场的创新需求,公司现拥有商标3件、软件著作权15件、1件、其它相关行业证书3件。利用我们自主知识产权,我们将致力于为用户提供的行业解决方案,和客户一起互联网服务的革新时代!
欢迎来到安徽金云网络信息技术服务有限公司网站,我公司位于旅游资源丰富,历史悠久,现代工业发达的亳州市。 具体地址是安徽亳州蒙城县公司街道地址,负责人是张先生。
主要经营AI电销机器人。
我们的产品优等,服务优质,您将会为选择我们而感到放心,我们将会为得到您认可而感到骄傲。
本页链接:http://www.cg160.cn/vgy-122449986.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
安徽金云网络信息技术服务有限公司成立于2014年4月,我们专注为全国中小企业提供企业网站制作、400电话、小程序制作、企业营销推广等互联网服务。在为中小企业提供基础互联网的同时,我们在这十年的发展过程中,不断在技术和行业领域应用中进行创新和突破,截止2023年5月,我们已在人工智能领域、农业物联网、工业物联网等..
- 我要给“南昌厂家智能搬运小车一件代工”留言
- 更多产品











相关分类






