
- 2024-11-04 06:13 6
- 产品价格:2980.00起
- 发货地址:安徽省亳州市蒙城县包装说明:不限
- 产品数量:不限产品规格:不限
- 信息编号:121575118公司编号:4287569
-
张先生 经理13335672717 (联系我请说明是在阿德采购网看到的信息)
- 进入店铺 在线咨询 QQ咨询
- 信息举报
青海厂家AGV搬运机器人代加工
- 相关产品:
青海厂家AGV搬运机器人代加工
所属行业:机械
- 产品描述
美国是机器人的诞。早在1962年就研制出世界上台工业机器人。比起号称机器人王国的日本起步至少要早五六年。经过40多年的发展,美国现已成为世界上的机器人强国之一,基础,技术。与其他相比,美国机器人的技术较加全面、,适应性也。具体体现在:机器人性能可靠,功能全面,度高;机器人语言研究发展较快,语言类型多、应用广,水平高居世界之。此外,美国机器人的智能技术发展也很快,其视觉、触觉等人工智能技术已在、汽车工业中广泛应用,高智能、高难度的机器人、太空机器人等发展迅速,并已经实际应用于扫雷、布雷、侦察、站岗及太空探测方面。美国(二手)机器人|机器手进口报关流程----恒邦设备进口清关公司。80年代中后期,随着各大厂家应用机器人的技术日臻成熟,代机器人的技术性能越来越满足不了实际需要。美国开始生产带有视觉、力觉的*二代机器人,并很快**了美国60%的机器人市场。美国有几大Adept Technology、American Robot、美国百特(Baxter)、ST Robotics大型机器人企业。
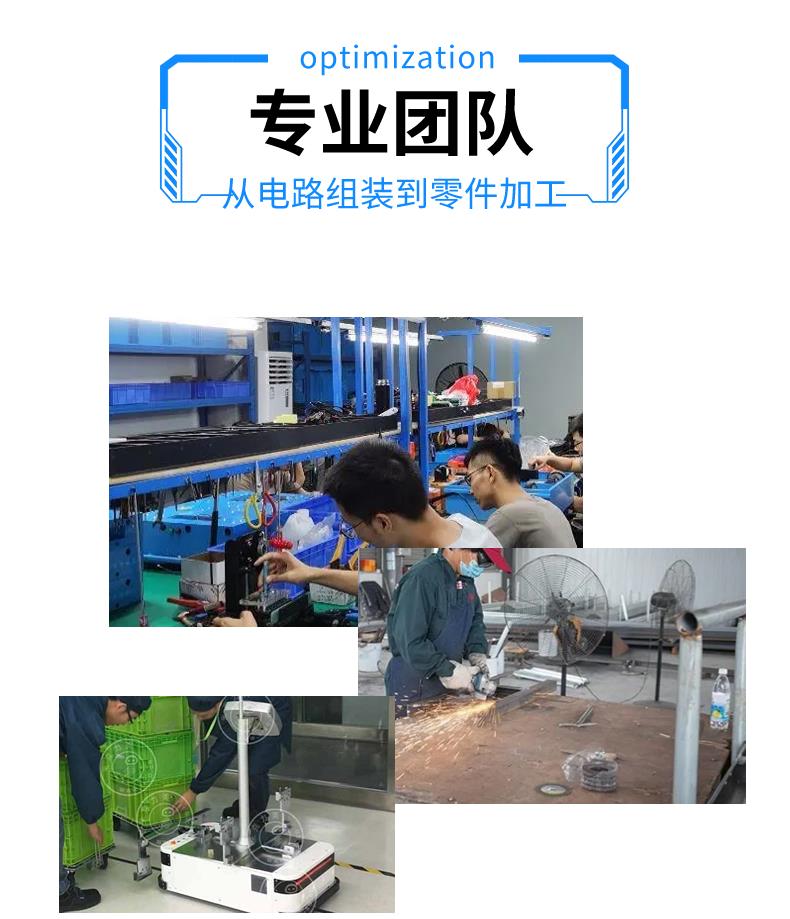
辊筒式搬运机器人广泛适用于工厂物流自动化输送领域,
标准配置:
无标记视觉导航模块;
定位精度±10毫米;
动态绕障模式;
ESD 防静电;
简洁直观的人机交互界面;
支持WMS/MES/ERP系统集成;
声光报警,多重安全措施保护;
额定承载重量500公斤;
背负滚筒式AGV自然导航式,定位;行驶路径灵活多变,能够适应复杂的行驶环境。
支持小通道900mm;
支持多种通信方式:PLC、光通信、红外通信;
服电机的规格均有额定转矩、大转矩及电机惯量等参数,各参数与负载转矩及负载惯量间存在相关联系,选用电机的输出转矩应符合负载机构的运动条件要求。
机构重量会影响电机的选用,运动条件也会改变电机的选用。惯量越大时,需要越大的加速及减速转矩,加速及减速时间越短时,也需要越大的电机输出转矩。选用伺服电机规格时,按照下列步骤进行。
(1)明确负载机构的运动条件要求,即运动速度、机构的重量、机构的运动方式等。
(2)依据运行条件要求进行合适的负载惯量计算,计算出机构的负载惯量。
(3)依据负载惯量与电机惯量选出适当的选定电机规格。
(4)结合初选的伺服电机惯量与负载惯量,计算出加速转矩及减速转矩。
(5)依据负载重量、配置方式、摩擦系数、运行效率计算出负载转矩。
(6)初选电机的大输出转矩必须大于加速转矩、负载转矩。
(7)依据负载转矩、加速转矩、减速转矩及保持转矩,计算出连续瞬时转矩。
(8)初选伺服电机的额定转矩应大于连续瞬时转矩。
安徽金云网络信息技术服务有限公司成立于2014年4月,我们专注为全国中小企业提供企业网站制作、400电话、小程序制作、企业营销推广等互联网服务。在为中小企业提供基础互联网的同时,我们在这十年的发展过程中,不断在技术和行业领域应用中进行创新和突破,截止2023年5月,我们已在人工智能领域、农业物联网、工业物联网等领域拥有成熟的产品和自主知识产权,已累积合作客户约3600多家,并与全国多家国企、上市公司等企业达成长期合作协议。 我们始于互联网,所以深知“坚持和创新才能转化为生产力”是互联网的**竞争力,凭借对软件和互联网行业的深刻理解,我们在坚持行业基础服务的同时,不断探索客户需求和凝聚大量人才去迎合市场的创新需求,公司现拥有商标3件、软件著作权15件、1件、其它相关行业证书3件。利用我们自主知识产权,我们将致力于为用户提供的行业解决方案,和客户一起互联网服务的革新时代!
欢迎来到安徽金云网络信息技术服务有限公司网站,我公司位于旅游资源丰富,历史悠久,现代工业发达的亳州市。 具体地址是安徽亳州蒙城县公司街道地址,负责人是张先生。
主要经营AI电销机器人。
我们的产品优等,服务优质,您将会为选择我们而感到放心,我们将会为得到您认可而感到骄傲。
本页链接:http://www.cg160.cn/vgy-121575118.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
安徽金云网络信息技术服务有限公司成立于2014年4月,我们专注为全国中小企业提供企业网站制作、400电话、小程序制作、企业营销推广等互联网服务。在为中小企业提供基础互联网的同时,我们在这十年的发展过程中,不断在技术和行业领域应用中进行创新和突破,截止2023年5月,我们已在人工智能领域、农业物联网、工业物联网等..
- 我要给“青海厂家AGV搬运机器人代加工”留言
- 更多产品











相关分类






