- 产品描述
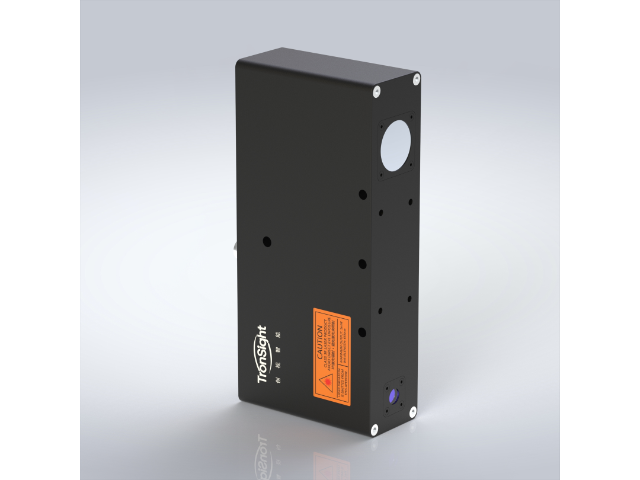
在感光元件的多个感光单元的主要排列方向为子弧矢向的情况下,成像物镜本身的MTFS>MTFT、或者在感光元件的多个感光单元的主要排列方向为子午方向的情况下,成像物镜本身的MTFT>MTFS,使得解析结果满足条件;和/或在成像物镜前和/或在成像物镜后加入能够引入像散的光学元器件,并且配合微调所述成像物镜与所述感光元件之间的相对距离使得解析结果满足条件。反光元件,反光元件设置在成像物镜的出射光路上,成像物镜的出射光经反光元件反射后,入射到感光元件。它可以实时测量物体的位移,并提供高精度的测量结果。南京激光位移传感器设备生产
传统的接触式平面检测精度低、稳定性差及对对象物检测条件要求苛刻,已逐渐被现代非接触式平面检测所替代。非接触式激光平面检测系统以其高精度、高分辨率及不受对象物材质、颜色或倾斜度的影响等优点,可对任何对象物进行平面检测。介绍系统结构和激光位移传感器的工作机理,并进行平面定性检测和定量检测试验,用OpenGI。绘制及拟合三维曲面。试验结果表明,该系统平面检测结果较好地反映出对象物平面起伏情况,并且达到系统的精度要求。黄浦区激光位移传感器产品使用误区此外,它们通常具有用户友好的界面和操作方式,使得使用者能够轻松地进行测量和数据分析。
将纸币放置在平台上,调整感测头与纸币的距离大约在30mm左右,直至焦点对准纸币且监视器中显示可变化的读数;(2)按下人机界面中的Start按钮,平台将以设置好的速度、相邻数据点物理间隔和时间间隔进行移动,直到数据采集完为止;(3)保存步骤(2)中所采集到的数据,取下纸币,对平台进行复位;(4)重复步骤(2)操作,采集到的为平台表面离基准线间的距离,为了减小平台表面起伏对纸币表面检测的影响,将步骤(2)中采集到的数据减去步骤(4)中的数据;
带通滤光片,设置于成像物镜的入射光路上。聚焦透镜,设置于激光器的出射光路上。可选地,上述感光元件为线阵感光元件,线阵感光元件的多个感光单元沿直线排列,该直线的延伸方向为多个感光单元的主要排列方向。上述也可以是感光元件为面阵感光元件,面阵感光元件包括以矩形排列的多个感光单元,面阵感光元件的长边延伸方向为多个感光单元的主要排列方向。此外,上述成像物镜可以为单一镜片,且成像物镜的物侧面和像侧面皆为非球面;或者,成像物镜为多个透镜组成的透镜组。激光位移传感器可以用于测量机械零件的尺寸和形状。
如权利要求1所述的激光位移传感器检验校准装置,其特征在于:所述可伸缩导轨包括一电动伸缩双直线导轨、一number one支撑件、一*二支撑件、一滑动轮、一伸缩制动开关以及一控制面板;所述number one支撑件安装在所述电动伸缩双直线导轨固定端的底部,所述*二支撑件安装在所述电动伸缩双直线导轨可伸缩端的底部;所述滑动轮设于所述*二支撑件的底部;所述伸缩制动开关设于所述*二支撑件的侧面;所述控制面板与所述电动伸缩双直线导轨电连接。激光位移传感器可以测量位移、厚度、振动、距离、直径等精密的几何测量。广州激光位移传感器产品基本性能要求
它还可以用于测量机械设备的振动情况,以提前发现故障。南京激光位移传感器设备生产
针对相关技术中的问题,本发明提出一种激光位移传感器,能够在不影响测量精度的情况下,降低成像物镜的设计难度,同时让测量系统能够较有效地应对振动、机械变形等不良影响。根据本发明,提供了一种激光位移传感器。根据本发明的激光位移传感器包括激光器、成像物镜以及感光元件,激光器用于射出激光束,由成像物镜接收并出射的光入射到感光元件。其中,在对成像物镜和感光元件CN1 06855391B3进行调制传递函数MTF解析时,解析结果满足以下条件:[0011]在感光元件的多个感光单元的主要排列方向为弧矢方向的情况下,MTFS>MTFT;在感光元件的多个感光单元的主要排列方向为子午方向的情况下,MTFT>MTFS;其中,MTFS为弧矢方向上的MTF值,MTFT为子午方向上的MTF值。进一步地,在进行解析时,空间频率为62.5lp/mm,如果多个感光单元的主要排列方向为弧矢方向,则MTFS>MTFT×10;如果多个感光单元的主要排列方向为子午方向,则MTFT>MTFS×10。[0015]可选地,空间频率为62.5lp/mm,如果多个感光单元的主要排列方向为弧矢方向,则MTFS≥0.5,MTFT<0.05;如果多个感光单元的主要排列方向为子午方向,则MTFT≥0.5,MTFS<0.05。南京激光位移传感器设备生产


苏州创视智能技术有限公司是一家专业从事精密测量传感器研发、生产、销售及服务的技术研发驱动型企业,由来自国内外高校的博士、硕士团队创立于苏州市吴中区木渎经济开发区。公司秉承“技术研发驱动,应用需求导向,服务客户**”的原则,致力于成为“*自主品牌”的“精密测量”,愿同各方一道,为国内仪器仪表及精密传感器的产业发展添砖加瓦。
欢迎来到苏州创视智能技术有限公司网站,我公司位于园林景观其*特,拥有 “中国园林之城”美称的苏州市。 具体地址是江苏苏州吴中区公司街道地址,负责人是刘钧。
主要经营激光三角位移传感器|光谱共焦位移传感器|白光干涉薄膜测厚传感器|线激光位移传感器。
单位注册资金:人民币 200 万元 - 300 万元。
我们公司主要供应激光三角位移传感器|光谱共焦位移传感器|白光干涉薄膜测厚传感器|线激光位移传感器等产品,我们的产品货真价实,性能可靠,欢迎电话咨询!
本页链接:http://www.cg160.cn/vgy-119362472.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 产品推荐
- 深圳航空推拉自锁连接器批发厂家 深圳市中力航科技供应 成都小体积图像识别模块算法 AI智能算法 成都慧视光电供应 四川5*10.8mm高胶体红发红 插件灯珠 质保三年 广州5*18.7mm高胶体暖白光 直插式LED灯珠 免费送样 广东回收新能源汽车底盘锂电池 有利于资源再利用 衢州高频技术 杭州莱润电气供应 市南区触摸屏维修公司 服务好 广州5*14.5mm高胶体绿发翠绿 LED发光二极管 高亮度 优势渠道 LTC1735CGN#TRPBF 优势渠道 LT8393JFE#PBF 松原手机电池回收 相容性好 山东透明陶瓷批发 欢迎来电 宜兴市航实陶瓷科技供应
- 相关文章
- 有哪些光谱共焦的用途 抱诚守真 苏州创视智能技术供应智能光谱共焦找谁 值得信赖 苏州创视智能技术供应非接触式光谱共焦厂家 欢迎咨询 苏州创视智能技术供应高采样速率光谱共焦主要功能与优势 欢迎咨询 苏州创视智能技术供应小型光谱共焦供应 诚信为本 苏州创视智能技术供应智能光谱共焦行情 服务至上 苏州创视智能技术供应点光谱共焦测量方法 欢迎咨询 苏州创视智能技术供应高采样速率光谱共焦常用解决方案 诚信为本 苏州创视智能技术供应品牌光谱共焦制造厂家 服务至上 苏州创视智能技术供应新品光谱共焦厂家哪家好 服务为先 苏州创视智能技术供应防水光谱共焦按需定制 欢迎来电 苏州创视智能技术供应高精度光谱共焦原理 欢迎来电 苏州创视智能技术供应
- 我要给“南京激光位移传感器设备生产 苏州创视智能技术供应”留言
- 更多产品

日本togami户上品牌机械寿命500万次交流接触器H**3TB024C 上海**玛进出口供应
云南学校桌面抗倍特板定制 淄博风尚宜都环保装饰供应

吉林雪多菲铜碳儿童护理牙膏加工厂 苏州康普唯健康科技供应

湖南换热器3d打印服务加工 信息推荐 上海当达科技供应
常州蜗壳3D打印 诚信互利 上海当达科技供应

湖南学校桌面抗倍特板 淄博风尚宜都环保装饰供应
辽宁面膜全自动分页贴标机支持定制 贴心服务 上海旭节自动化设备供应

黑龙江玻璃纤维套管黄腊管厂 服务至上 中山鼎彩电子材料供应
云南高压装饰板安装 淄博风尚宜都环保装饰供应

余杭区年会会展策划供应商 杭州新引擎广告传媒供应
江西糖果包装袋全自动分页贴标机支持定制 和谐共赢 上海旭节自动化设备供应







