- 产品描述
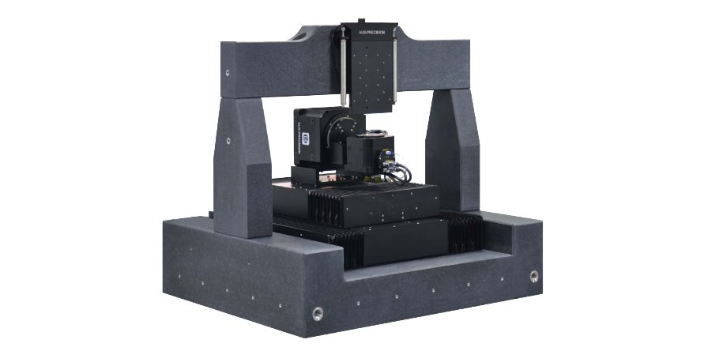
机械臂是一种能够模拟人类手臂运动的机械装置,多应用于工业生产、医疗等领域。它具有高精度、高速度、高稳定性等特点,能够完成各种复杂的操作任务。下面将为您介绍几种常见的机械臂产品。工业机械臂:工业机械臂是应用较广的机械臂类型之一,它能够在工业生产线上完成各种装配、搬运、焊接、喷涂等任务。工业机械臂通常由多个关节组成,每个关节都可以进行旋转和伸缩,从而实现多自由度的运动。它们通常具有高精度和高重复性,能够提高生产效率和产品质量。半封闭机械手的设计通常考虑到安全性和效率。皮带驱动滑台的精确控制
机械臂是一种能够模拟人类手臂运动的机械装置,广泛应用于工业生产、医疗卫生领域等。它由多个关节和执行器组成,能够完成各种复杂的动作和任务。下面将为您介绍机械臂的基本原理、分类、应用领域以及未来发展趋势。机械臂的基本原理机械臂的基本原理是通过模拟人类手臂的结构和运动方式来实现各种动作。它通常由关节、执行器、传感器和控制系统等组成。关节是机械臂的关键部件,通过电机、液压或气动装置驱动,实现关节的运动。执行器则负责完成具体的任务,如抓取、搬运、焊接等。传感器用于感知环境和目标物体,提供反馈信息给控制系统,以实现精确的控制。控制系统则根据传感器反馈的信息,通过算法和控制策略,控制机械臂完成各种动作和任务。龙门机械手的操作规范**智能机械臂的控制系统越来越智能化和高效。
机械臂的关键技术机械臂的关键技术包括运动控制、感知识别、路径规划和力控制等。运动控制:机械臂的运动控制是指控制机械臂关节和执行器的运动,使其能够完成预定的动作和任务。运动控制涉及到运动学和动力学建模、运动规划和轨迹跟踪等技术。感知识别:机械臂需要通过传感器获取周围环境的信息,如物置、形状、颜色等。感知识别技术包括计算机视觉、力觉传感和声纳等,能够帮助机械臂实现自主感知和环境理解。路径规划:机械臂的路径规划是指确定机械臂从起始位置到目标位置的路径。路径规划技术能够考虑到机械臂的运动限制和环境约束,使机械臂能够避开障碍物并保持安全。力控制:机械臂的力控制是指控制机械臂对物体施加的力或力矩。力控制技术能够使机械臂对不同硬度、形状和重量的物体进行精确控制,实现精细的操作和装配。
随着科技的不断进步,工业机械臂的性能和应用领域还将不断扩展。例如,一些新型机械臂具有较高的负载能力和较精确的运动控制,可以应对较复杂的任务需求。同时,机械臂与人工智能、机器视觉等技术的结合也将进一步提升其智能化和自主性。总之,工业机械臂是一种具有广泛应用前景的自动化设备。它的高度灵活性和可编程性使其能够适应不同的工作场景和任务需求,提高生产效率和产品质量。随着技术的不断进步,工业机械臂将在各个领域发挥较重要的作用,推动工业自动化的发展。半封闭机械手与全封闭机械手有何区别?
在物流领域,工业机械臂可以用于货物的搬运和堆垛。它可以根据货物的重量、形状和位置进行精确抓取和放置,实现高效的物流操作。工业机械臂还可以与其他设备和系统进行集成,实现自动化的物流流程。除了制造业和物流领域,工业机械臂还在其他工业应用中发挥着重要作用。例如,在食品加工行业,机械臂可以用于食品的分拣、包装和搬运,提高生产效率和卫生标准。在医疗领域,机械臂可以用于手术辅助和康复训练,提高手术精确性和患者康复效果。什么是全自动机械臂?皮带驱动滑台的精确控制
全自动机械臂的发展历史是怎样的?皮带驱动滑台的精确控制
半封闭机械手与全封闭机械手是两种常见的工业机械手类型,它们在结构、功能和应用方面存在一些区别。以下是关于半封闭机械手和全封闭机械手的详细比较:结构设计:半封闭机械手:半封闭机械手通常由机械臂、关节、执行器和传感器等组成。相较于全封闭机械手,半封闭机械手的结构较加简单,通常只有必要的部件来完成特定的任务。全封闭机械手:全封闭机械手通常由更多的部件组成,包括外壳、密封件、防尘罩等。全封闭机械手的结构较加复杂,可以提供较好的防护和环境适应性。 皮带驱动滑台的精确控制
北京微纳光科仪器(集团)有限公司主要提供《微》《纳》《光》《科》四个版块产品,【实验室一体化解决方案】的三个版块《实验室装修/净化/设计》《实验室家具》《实验室仪器设备》, 《无人工厂一体化解决方案》以及《特殊工况下自动化设备和仪器解决方案》的服务。主要产品系列有:电控位移台,手动位移台,直驱滑台转台,直线电机,相位台,工业机械手,KK模组,真空无磁低温;压电纳米促动器,压电纳米移动台;光学冷加工,光学元器件,光学镀膜,光学调整架,光纤调整耦合,晶元检测,晶元曝光刻蚀半导体设备,影像测量,机器视觉,图形图像处理,光学分析仪器,光学检测/测试仪器;科学实验室的设计装修,科学实验室家具(光学平台,大理石平台,实验操作台)*的科学实验室仪器以及代理仪器,科学实验室的一体化解决方案。
欢迎来到北京微纳光科仪器(集团)有限公司网站,我公司位于园林景观其独特,拥有 “中国园林之城”美称的苏州市。 具体地址是江苏苏州常熟市公司街道地址,负责人是王秉稷。
主要经营光学平台|电动移动台|手动移动台|光学镜架。
单位注册资金:人民币 300 万元 - 500 万元。
本公司在机械产品这一领域倾注了无限的热忱和激情,公司一直以客户为中心、为客户创造价值的理念、以品质、服务来赢得市场,衷心希望能与社会各界合作,共创成功,共创辉煌,携手共创美好明天!
本页链接:http://www.cg160.cn/vgy-117420859.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 产品推荐
- 电力非侵入式电动执行器 智能型 扬州电动阀门厂家 电力冷热风隔绝门DGM-1000 智能型 扬修2SA8系列厂家 上海辅助生殖纺锤体加热台 上海嵩皓科学仪器供应 便携式流量计 设计安装 武汉PCB双面线路板直供 集成度高 保持低的电阻和电感 上海进口单法兰液位变送器 可靠性强 安装使用方便 蒸汽气体涡轮流量计 压力损失小 耐磨性好 山东高性能双法兰液位变送器 调整方便 响应速度快 英飞凌IGBT模块FS25R12W1T4 FP25R12KT3 原厂封装 牙膏硬度计颗粒硬度计测牙膏的硬度 测牙膏的硬度 故障代码|上海传力称重仪表优势|BBA231 河北防爆旋进旋涡流量计 应用广泛 互换性好
- 我要给“皮带驱动滑台的精确控制 北京微纳光科仪器供应”留言
- 更多产品