
- 产品描述
视觉分选系统简介
视觉分选系统通过视觉传感器获取环境的二维图像,并通过视觉处理器进行分析和解释,进而转换为符号,让机器人能够辨识物体,并确定其位置,按照用户设计的动作进行抓取,移位,搬运等操作。在流水线上实现实时检测,分选产品,对目标产品进行抓取分检。与其他视觉设备相比的优势是,实现检测,分选一体化,解决了传统视觉设备只能检测无法在线分选的问题。
关键**
★ 视觉分选系统控制
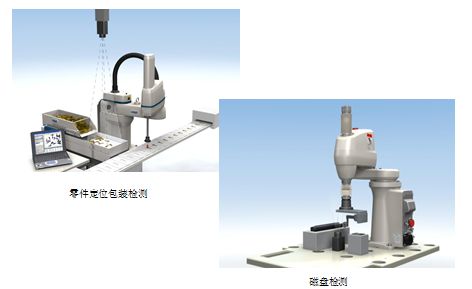
★基于PCBASE视觉定位与检测视觉分选系统(分选不良品)应用实例
视觉引导四轴机器人(分选不良品)在三维平面上可进行任意位置定位,达到适应多种位置高度检测需求。检测仪可用于产品定位、大规格产品尺寸测量、排布密集产品等领域,消除单一相机无法满足的精度要求,人工检测不稳定等因素。广泛适用于电路板、电子元器件、半导体等细分领域,解决行业生产难题。
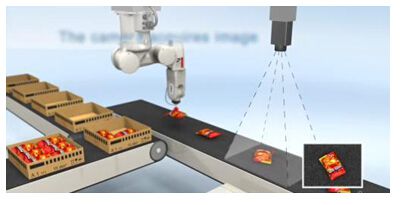
机器人在线分选
视觉分选系统(分选不良品)与产线结合,分选不良产品,在食品包装、汽车、电子等行业应用广泛。
空间内引导作业
视觉引导定位,机器人按照视觉确定的位置执行作业,在危险、污染、高温等不适宜人操作的恶劣环境下视觉机器人可替代人做喷漆、焊接等工作,在精密操作中,视觉机器人可替代人做高精度的操作,例如雕刻,空间内微小产品抓取等。


西安海克易邦光电科技有限公司成立于2007年,是一家致力于成为国内良好、****的“机器视觉应用系统解决方案提供商”、“机器视觉自动化检测方案提供商”和“视觉检测质量实时管理方案提供商”的机构。一直专注于图形图像应用领域的研究开发,提供影像测量、缺陷检测、模式识别、动态跟踪与三维立体视觉技术等的**算法及解决方案。应用范围涉及包装印刷、电子、纺织、汽车制造、**、半导体、医疗制药、现代物流、交通安防等领域。
欢迎来到西安海克易邦光电科技有限公司网站,我公司位于历史悠久,有着7000多年文明史,中国历史上建都朝代较多、时间较长、影响力较大的都城—西安。 具体地址是陕西西安公司街道地址,负责人是张旭阳。
主要经营视觉检测、视觉系统、自动化检测、机器视觉。
单位注册资金:人民币 50 万元 - 100 万元。
本公司在机械产品这一领域倾注了无限的热忱和激情,公司一直以客户为中心、为客户创造**的理念、以品质、服务来赢得市场,衷心希望能与社会各界合作,共创成功,共创辉煌,携手共创美好明天!
本页链接:http://www.cg160.cn/vgy-105653934.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 产品推荐
- 娄底QS亲水筛板-欢迎来电详谈 无锡spe silica柱 更多请咨询 大同邯郸Silica固相萃取柱 点击查询更多 PRX可控硅 T9G0041203DH 聚肯电子 惠州c18萃取柱silica 点击查询更多 长沙DXQC-1心理测试系统 孕期心理测评系统 漯河一体式X射线源 郑州雷尼绍机床配件 能够满足高精度加工的需求 eupec可控硅 T2709N18TOF 深圳回收网络分析仪 智信通电子仪器 玉林X光高压电源维修 晶闸管导通条件 TFI143-630-15 报价表
- 相关文章
- 6500N视觉控制器应用于视觉定位跟踪抓取对位 安装方便操作简单HK-E1900G工业视觉控制器应用自动光学检测 半导体视觉系统视觉定位系统跟踪抓取 采用HK-V6500N视觉控制器 集成光源相机控制HK-E1900G工业视觉控制器应用自动光学检测 定位 药剂瓶盖等HK-E1900G 图像处理器 应用之视觉定位系统 专业定制类方法视觉定位跟踪抓取 采用HK-V6500N 图形处理器 集成光源相机控制调节HK-V6500N 图形处理器 应用 坐标螺孔定位 精度可达0.01mm海克易邦HK-V6500N 图形处理器 应用之半导体视觉检测系统海克易邦HK-V6500N 图像处理器 应用之DIP半导体双通道检测HK-V5100B 图像处理器 应用之视觉定位系统 接口连接简单不出错HK-V5100B图像处理器 8路输出 4路输入 项目应用范围较广视觉控制系统 HKV6500N 视觉处理与光源相机控制有效融合
关于西安海克易邦光电科技有限公司
商铺首页 |
更多产品 |
联系方式
西安海克易邦光电科技有限公司成立于2007年,是一家致力于成为国内良好、****的“机器视觉应用系统解决方案提供商”、“机器视觉自动化检测方案提供商”和“视觉检测质量实时管理方案提供商”的机构。一直专注于图形图像应用领域的研究开发,提供影像测量、缺陷检测、模式识别、动态跟踪与三维立体视觉技术等的**算法及解..
- 我要给“CCD视觉系统-CCD视觉分选系统-机器人视觉分选系统”留言
- 更多产品











相关分类






