- 产品描述
机器人作为自动化生产线中的重要设备,已成为工业生产自动化的重要支柱之一,特别适用于搬运、冲压等重复性、危险性的加工行业。它可以在减轻繁重的体力劳动、改善劳动条件和安全生产;提高生产效率、稳定产品质量、降低废品率,上海多功能主从控制机器人系统、降低生产成本及劳动成本、增强企业的竞争力等方面起到及其重要的作用,上海多功能主从控制机器人系统。据统计,工业机器人技术广泛应用于机械加工行业,上海多功能主从控制机器人系统,能够提高生产效率,可节省劳动力成本50%以上。与此同时,由于机器人的介入,取代了人工在工位上的操作,能够很大程度地降低工伤事故,确保员工的安全。主从控制机器人的原理是什么?上海多功能主从控制机器人系统
目前的主从控制系统采用主、从两级处理器实现系统的全部控制功能。主CPU实现管理、坐标变换、轨迹生成和系统自诊断等;从CPU实现所有关节的动作控制。主从控制方式系统实时性较好,适于高精度、高速度控制,但其系统扩展性较差,维修困难!而凯富博科*的主从控制系统用户可根据不同的应用场景选择不同类型的主手,与液压机械臂6自由度同构设计,操作较直观,临场感较好,双手可同时操作双臂进行协同作业,完成较为复杂作业任务;在操作空间允许情况可用StandardMaster进行单手灵活操作。同时配备主从控制软件中/英文操作系统,采用工业级高亮触摸屏,在室外强光下正常使用。上海智能主从控制机器人设计凯富博科的主从控制机器人品质值得推荐。
机器人控制系统的基本功能有:1.控制机械臂末端执行器的运动位置(即控制末端执行器经过的点和移动路径);2.控制机械臂的运动姿态(即控制相邻两个活动构件的相对位置);3.控制运动速度(即控制末端执行器运动位置随时间变化的规律);4.控制运动加速度(即控制末端执行器在运动过程中的速度变化);5.控制机械臂中各动力关节的输出转矩:(即控制对操作对象施加的作用力);6.具备操作方便的人机交互功能,机器人通过记忆和再现来完成规定的任务;7.使机器人对外部环境有检测和感觉功能。工业机器人配备视觉、力觉、触觉等传感器进行测量、识别,判断作业条件的变化等。
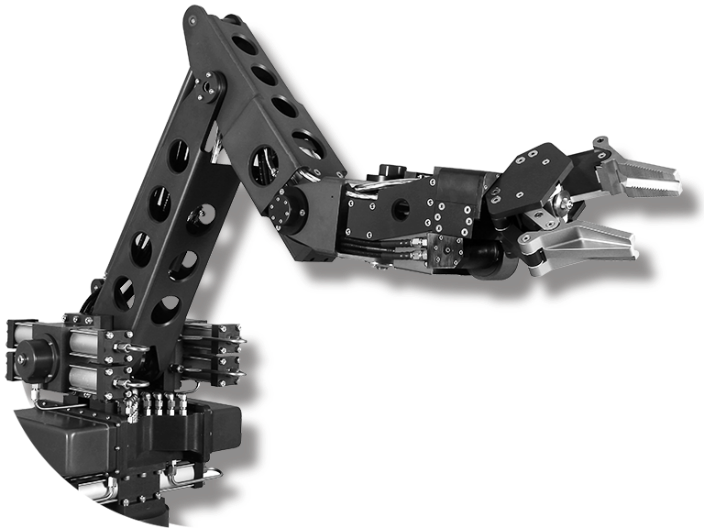
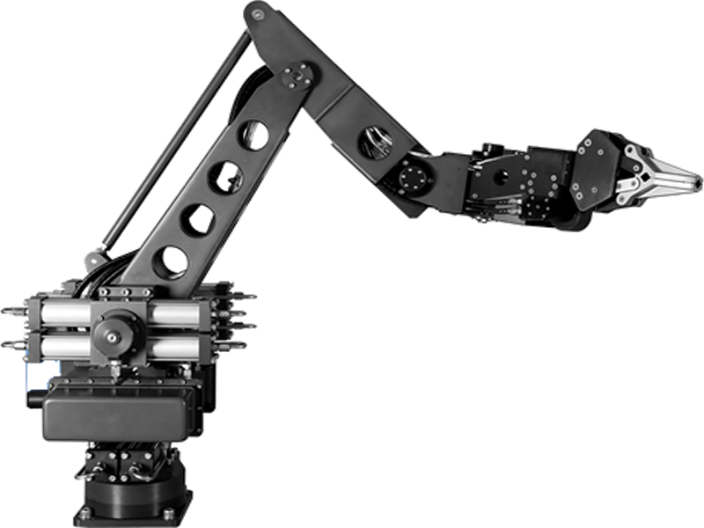
国家科技部规划司**在市、区两级科技局主要**陪同下到凯富博科调研参观。本次调研参观了凯富博科的展厅和装配车间,并观看了液压机械臂操作演示。调研团队深入了解凯富博科液压机械臂产品特性、应用场景、行业市场、市场售价、毛利率等情况。并对公司主要产品“Mercury水星”、“Uranus天王星”6+1轴主从控制液压机械臂和“Jupiter木星”5轴大负载液压机械臂的技术创新给予了高度评价。用**技术不断为用户提供急难险重环境下的作业机器人是凯富博科始终不变的追求目标。主从控制机器人的发展历程是什么?
采用基于主从机器人形式的钻铆工作流程,提出为工业机器人编码,利用Ethernet(TCP/IP)进行系统和机器人之间的信息交互,该模式能实现2台及2台以上的工业机器人的协同运动控制,并构建了一种深度应用现场总线技术的基于PC的集成控制系统,能够实现与其他自动化设备的集成。由于对于机器人的控制是基于外部自动控制模式下的,为了实现该控制模式,对机器人的系统变量进行更改,该更改基于EtherCAT工业以太网和ProfiBus总线实现;Ethernet(TCP/IP)用于与机器人之间进行信息交互,并对机器人进行运动规划。如何设计一款合适的主从控制机器人?江苏主从控制机器人生产厂家
特种作业相关的主从控制机器人有哪些推荐?上海多功能主从控制机器人系统
机器人运动控制要求机器人能够按照预定的控制指令和控制方式执行相应运动。常用的运动控制方式有三种:笛卡尔空间控制方式、关节空间控制方式、逆雅可比控制方式。在笛卡尔空间控制方式中,需要建立主从手笛卡尔空间坐标系之间的对应关系,将主手的运动信息传递至从手的笛卡尔空间中,根据正、逆运动学求解出关节的位置信息。该种控制方式适用于主从异构模型,在实际控制中还需实时调节主手对从手的不**程映射系数。在关节空间控制方式中,主手各关节的运行信息一一对应的传递至从手各关节,其适用于主从同构式控制模型。逆雅可比控制方式,实质是对机器人进行速度控制,根据主手末端点的速度信息经过逆雅可比矩阵求解,得到从手各关节的速度信息。该种控制方式等效于笛卡尔空间控制方式,在某些层面上,两者可以相互结合,使得控制较加精确。上海多功能主从控制机器人系统
浙江凯富博科科技有限公司是一家生产型类企业,积极探索行业发展,努力实现产品创新。公司致力于为客户提供安全、质量有保证的良好产品及服务,是一家有限责任公司企业。公司拥有专业的技术团队,具有液压机械臂,主从控制机器人,6+1轴机械臂,带电作业机器人等多项业务。凯富博科将以真诚的服务、创新的理念、高品质的产品,为彼此赢得全新的未来!

浙江凯富博科科技有限公司是****的主从控制特种作业机器人系统制造商以及解决方案提供商。公司以“让机器人完成急难险重的工作”为使命,致力于通过技术和产品的研发,为特种作业提供一份安全**,让我们服务的群体生活得较好。 公司的主要业务是提供作业级特种机器人产品、关键部件、整体解决方案,为在急难险重环境作业中解放人力、**人身安全提供产品和技术支持。凯富博科以至诚守信、创新进取、协作共赢为立足之本,坚持**技术与*相结合,锐意进取致力成为世界**特种作业机器人研发与服务的**化企业。 公司拥有一批特种机器人领域工作经验丰富的技术人员,专业涵盖机械、液压、测控、软件、通信、图像处理、人工智能等领域,依靠**的技术,不断为用户提供满意的特种作业装备产品是凯富博科始终不变的追求。
欢迎来到浙江凯富博科科技有限公司网站,我公司位于中国十佳宜居城市之一—金华市。 具体地址是浙江金华金东区公司街道地址,负责人是辛华伟。
主要经营液压机械臂|主从控制机器人|6+1轴机械臂|带电作业机器人。
单位注册资金:人民币 200 万元 - 300 万元。
本公司在机械产品这一领域倾注了无限的热忱和激情,公司一直以客户为中心、为客户创造价值的理念、以品质、服务来赢得市场,衷心希望能与社会各界合作,共创成功,共创辉煌,携手共创美好明天!
本页链接:http://www.cg160.cn/vgy-103892474.html
以上信息由企业自行发布,该企业负责信息内容的完整性、真实性、准确性和合法性。阿德采购网对此不承担任何责任。 马上查看收录情况: 百度 360搜索 搜狗
- 产品推荐
- 安庆冷却塔哪里买 服务至上 绍兴金贤供水设备供应 济南干式变压器温度控制器价格 LD-B30 小孔浮球阀KXF报价_角型定水位阀_阀门型号丰富 岳阳开关柜智能操控装置价格 结构紧凑 梅州波峰焊电话 热风波峰焊 常州防护罩厂家 查看详情 农用机械流水线 涂装设备 行者有远志 · 自动生产设备 宁德天然气隧道退火炉 环保材料燃气隧道炉价格 输送式 增材 衢州主轴激光熔覆设备 立匠 自动生产线设备 以事后进 拖拉机底盘组装测试流水线 安全泄压阀AX742X单价_低阻直流泄压阀_阀门型号丰富 伺服驱动器组装生产流水线 先树人品 自动生产线设备
- 相关文章
- 江苏深海特种作业机器人设计 浙江凯富博科科技供应上海智能液压机械臂优势 浙江凯富博科科技供应江苏应急救援特种作业机器人系统 浙江凯富博科科技供应上海小型特种作业机器人生产厂家 浙江凯富博科科技供应浙江6+1 轴特种作业机器人哪家好 浙江凯富博科科技供应浙江智能特种作业机器人设计 浙江凯富博科科技供应浙江应急救援特种作业机器人哪家好 浙江凯富博科科技供应浙江工业特种作业机器人采购 浙江凯富博科科技供应浙江大型特种作业机器人设计 浙江凯富博科科技供应浙江多功能特种作业机器人联系方式 浙江凯富博科科技供应江苏小型液压机械臂供应商 浙江凯富博科科技供应上海深海工程特种作业机器人生产厂家 浙江凯富博科科技供应
- 我要给“上海多功能主从控制机器人系统 浙江凯富博科科技供应”留言
- 更多产品
















